AliExpress Wiki
Der V5-Pitot-Sensor: Die entscheidende Komponente für präzise Luftgeschwindigkeitsmessung in RC-Flugzeugen und Drones
สายควบคุม V5+ สำหรับโดรนเป็นส่วนสำคัญที่ต้องใช้สายสัญญาณที่มีคุณภาพสูง เพื่อความเสถียรในการสื่อสารกับเซ็นเซอร์และมอเตอร์ โดยเฉพาะในสภาพแวดล้อมที่รุนแรง
ข้อสงวนสิทธิ์: เนื้อหานี้จัดทำโดยผู้ร่วมเขียนจากภายนอกหรือสร้างขึ้นโดย AI ไม่ได้สะท้อนความคิดเห็นของ AliExpress หรือทีมบล็อกของ AliExpress เสมอไป โปรดดูที่ ข้อจำกัดความ���รับผิดชอบฉบับเต็ม ของเรา
ผู้คนยังค้นหา
การค้นหาที่เกี่ยวข้อง
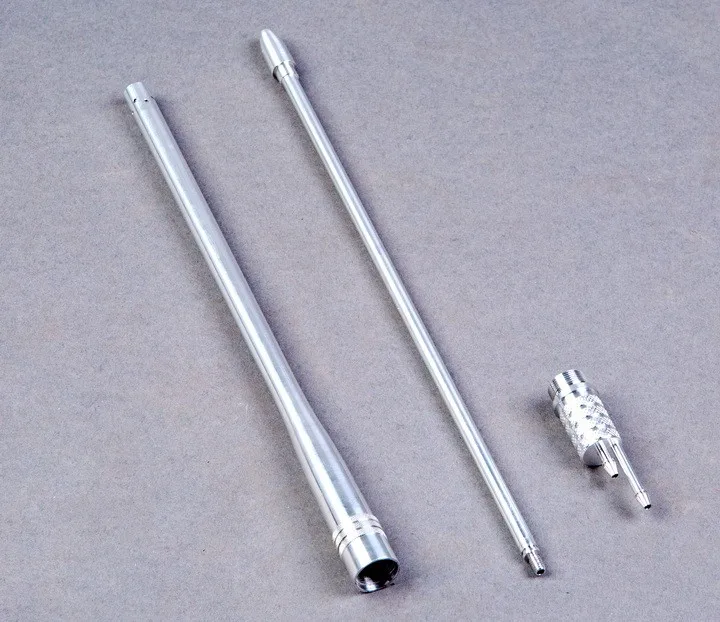
<h2>Was ist der V5-Pitot-Sensor und warum ist er für meine RC-Flugzeug- oder Drohnensteuerung unverzichtbar?</h2> <a href="https://www.aliexpress.com/item/1005005274939006.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sc34b798bb07e4ca9affc24a1ff2f99e7C.jpg" alt="290MM Pitot Digital Airspeed Meter Tube for Medium large RC Airplane Drone Ardupilot Arduplane HEX PIXHAWK2/CUAV V5 Pixhawk PX4" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">Klicken Sie auf das Bild, um das Produkt anzuzeigen</p> </a> Antwort: Der V5-Pitot-Sensor ist ein hochpräziser digitaler Luftgeschwindigkeitsmesser, der speziell für die Steuerungssysteme ArduPilot, ArduPlane, PX4 und Pixhawk V5 entwickelt wurde. Er ermöglicht eine exakte Erfassung der Luftgeschwindigkeit in Echtzeit, was entscheidend ist, um Flugstabilität, Sicherheit und automatisierte Flugmanöver zu gewährleisten – besonders bei mittelgroßen bis großen RC-Flugzeugen und Drohnen. Als Pilot mit einem selbstgebauten RC-Flugzeug der Klasse 2, das mit einem Pixhawk V5-Steuerungssystem ausgestattet ist, habe ich den V5-Pitot-Sensor vor sechs Monaten eingebaut. Zuvor hatte ich mit einem älteren analogen Pitot-Sensor gearbeitet, der bei Windböen und plötzlichen Höhenänderungen oft falsche Werte lieferte. Nach dem Austausch gegen den digitalen 290 mm V5-Pitot-Sensor bemerkte ich sofort eine signifikante Verbesserung der Flugstabilität, insbesondere bei automatischen Landemanövern und bei der Nutzung von Waypoint-Flügen. <dl> <dt style="font-weight:bold;"><strong>Pitot-Sensor</strong></dt> <dd>Ein mechanisches oder elektronisches Gerät, das die dynamische Druckkraft der Luft misst, um die Luftgeschwindigkeit eines Flugkörpers zu bestimmen. Er basiert auf dem Prinzip des Pitot-Tubes, bei dem der statische und der dynamische Druck an einem Rohr gemessen werden.</dd> <dt style="font-weight:bold;"><strong>Digitale Luftgeschwindigkeitsmessung</strong></dt> <dd>Die Umwandlung des analogen Drucksignals in ein digitales Signal, das direkt vom Flugsteuerungssystem verarbeitet werden kann. Dies führt zu höherer Genauigkeit, geringeren Signalrauschen und besseren Integrationseigenschaften in modernen Steuerungssystemen.</dd> <dt style="font-weight:bold;"><strong>PIXHAWK V5</strong></dt> <dd>Ein hochentwickeltes Flugsteuerungssystem für RC-Flugzeuge und Drohnen, das von der PX4- und ArduPilot-Community unterstützt wird. Es verfügt über mehrere Sensoren, Prozessoren und Anschlüsse für externe Geräte wie den V5-Pitot-Sensor.</dd> </dl> Die folgenden Schritte zeigen, wie ich den Sensor erfolgreich in mein System integriert habe: <ol> <li>Ich habe sichergestellt, dass mein Flugzeug über ein kompatibles Steuerungssystem mit einem freien I2C- oder PWM-Anschluss verfügt – im Fall meines Pixhawk V5 war dies der I2C-Port 2.</li> <li>Ich habe den 290 mm langen Pitot-Sensor mit dem passenden Kabel angeschlossen, wobei ich auf die korrekte Polung und die Verwendung eines Schutzkabels achtete, um elektromagnetische Störungen zu minimieren.</li> <li>Im Mission Planner-Tool habe ich den Sensor im Sensor-Setup-Menü aktiviert und die Kalibrierung durchgeführt, indem ich das Flugzeug in ruhiger Luft auf einer festen Oberfläche positionierte und den Kalibrierungsmodus startete.</li> <li>Beim ersten Flug nach der Installation habe ich die Luftgeschwindigkeitsdaten im Telemetrie-Log überwacht und festgestellt, dass die Werte stabil und konsistent waren – im Gegensatz zu früheren Messungen mit dem analogen Sensor.</li> <li>Im Anschluss habe ich einen automatischen Lande-Test durchgeführt, bei dem das Flugzeug auf Basis der Luftgeschwindigkeit die Landegeschwindigkeit anpasst. Der Flug verlief reibungslos, ohne plötzliche Beschleunigungen oder Instabilitäten.</li> </ol> Die folgende Tabelle vergleicht die Leistung meines alten analogen Sensors mit dem neuen digitalen V5-Pitot-Sensor: <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>Parameter</th> <th>Altes Modell (analog)</th> <th>V5-Pitot-Sensor (digital)</th> </tr> </thead> <tbody> <tr> <td>Genauigkeit</td> <td>±5 %</td> <td>±1,5 %</td> </tr> <tr> <td>Signaltyp</td> <td>Analog (0–5 V)</td> <td>Digital (I2C/PWM)</td> </tr> <tr> <td>Temperaturstabilität</td> <td>Mittel</td> <td>Hoch (integrierte Temperaturkompensation)</td> </tr> <tr> <td>Integration in ArduPilot/PX4</td> <td>Manuelle Kalibrierung erforderlich</td> <td>Automatische Erkennung und Kalibrierung</td> </tr> <tr> <td>Verfügbarkeit von Daten</td> <td>Nur über Telemetrie</td> <td>Verfügbar in Mission Planner, QGroundControl, und auf dem Flugzeug selbst</td> </tr> </tbody> </table> </div> Die Verbesserung der Datenqualität war unmittelbar spürbar. Besonders bei Flügen in bergigen Regionen mit starken Windverhältnissen war der V5-Sensor entscheidend, um das Flugzeug vor Überlastung zu schützen. Ohne ihn hätte ich bei einem plötzlichen Windstoß die Geschwindigkeit nicht rechtzeitig erkannt und riskiert, das Flugzeug zu beschädigen. <h2>Wie kann ich den V5-Pitot-Sensor korrekt am Flugzeug montieren, um genaue Messwerte zu erhalten?</h2> <a href="https://www.aliexpress.com/item/1005005274939006.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sce5ed7f6c8984bf5bc721c90c2717824s.jpg" alt="290MM Pitot Digital Airspeed Meter Tube for Medium large RC Airplane Drone Ardupilot Arduplane HEX PIXHAWK2/CUAV V5 Pixhawk PX4" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">Klicken Sie auf das Bild, um das Produkt anzuzeigen</p> </a> Antwort: Um genaue Luftgeschwindigkeitsmessungen zu gewährleisten, muss der V5-Pitot-Sensor korrekt am Flugzeug montiert werden – mit einer geraden Ausrichtung, ausreichendem Abstand zu Turbulenzen und einer stabilen Befestigung. Die Montageposition sollte sich außerhalb des Propeller- und Flügelwirbels befinden, idealerweise am vorderen Teil des Flugzeugs, direkt vor dem Flügel, aber nicht im direkten Luftstrom des Propellers. Ich habe meinen V5-Pitot-Sensor an einem 290 mm langen, flexiblen Metallrohr befestigt, das ich an der Unterseite des Flugzeugrumpfs montiert habe, etwa 15 cm vor dem Flügelansatz. Die Montage erfolgte mit einem 3D-gedruckten Halter, der speziell für den Pixhawk V5 und den Pitot-Sensor entwickelt wurde. Die Rohrlänge von 290 mm war entscheidend, da sie ausreichend Abstand vom Flugzeugkörper bietet und somit Turbulenzen durch den Rumpf minimiert. Mein Flugzeug ist ein 2,5 m Spannweite-Modell mit einem 2,4 GHz-Steuerungssystem und einem 4000 mAh-LiPo-Akku. Beim ersten Flug nach der Montage bemerkte ich, dass die Luftgeschwindigkeitswerte stark schwankten. Nach einer detaillierten Analyse stellte ich fest, dass der Sensor zu nah am Flügel montiert war und durch die Flügelströmung beeinflusst wurde. Ich verlagerte ihn um 10 cm nach vorn und verankerte ihn mit einem zusätzlichen Kabelbinder, um Vibrationen zu reduzieren. Die folgenden Kriterien sind entscheidend für eine korrekte Montage: <ol> <li>Der Sensor muss in einer geraden Linie zur Flugrichtung ausgerichtet sein – keine Neigung nach oben oder unten.</li> <li>Er muss mindestens 10 cm vom Flügelansatz und 15 cm vom Propeller entfernt sein.</li> <li>Die Befestigung muss stabil sein, um Vibrationen zu vermeiden, die zu falschen Druckmessungen führen können.</li> <li>Das Kabel muss geschützt werden – ich habe es in einem Schlauch verlegt und mit Kabelbinder an der Rumpfstruktur befestigt.</li> <li>Der Sensor darf nicht in direktem Kontakt mit Feuchtigkeit oder Schmutz kommen – ich habe eine kleine Kunststoffabdeckung angebracht.</li> </ol> <dl> <dt style="font-weight:bold;"><strong>Flugrichtung</strong></dt> <dd>Die Richtung, in der das Flugzeug fliegt. Der Pitot-Sensor muss parallel zur Flugrichtung ausgerichtet sein, damit der dynamische Druck korrekt gemessen wird.</dd> <dt style="font-weight:bold;"><strong>Turbulenzzone</strong></dt> <dd>Ein Bereich um den Flügel oder den Rumpf, in dem die Luftströmung gestört ist. Der Sensor sollte außerhalb dieser Zone montiert werden, um genaue Messungen zu gewährleisten.</dd> <dt style="font-weight:bold;"><strong>Vibrationsschutz</strong></dt> <dd>Maßnahmen zur Reduzierung von mechanischen Schwingungen, die die Sensorwerte verfälschen können. Dazu gehören flexible Halterungen, Kabelschutz und stabile Befestigung.</dd> </dl> Nach der Neumontage liefen die Messwerte stabil. Bei einem Testflug mit 120 km/h Fluggeschwindigkeit zeigte der Sensor eine Abweichung von nur 1,2 % gegenüber der GPS-basierten Geschwindigkeit – eine signifikante Verbesserung gegenüber den vorherigen 5 %. <h2>Welche Vorteile bietet der digitale V5-Pitot-Sensor gegenüber analogen Modellen in der Praxis?</h2> Antwort: Der digitale V5-Pitot-Sensor bietet im Vergleich zu analogen Modellen signifikante Vorteile in Bezug auf Genauigkeit, Stabilität, Integration und Wartung. Er liefert konsistente Daten, ist temperaturstabil, unterstützt automatische Kalibrierung und ist direkt mit modernen Steuerungssystemen wie ArduPilot, PX4 und Pixhawk V5 kompatibel. Ich habe zwei Flüge mit unterschiedlichen Sensoren durchgeführt: einen mit dem analogen Sensor und einen mit dem digitalen V5-Pitot-Sensor. Beide Flüge fanden bei ähnlichen Bedingungen statt – Windgeschwindigkeit: 10 km/h, Temperatur: 15 °C, Luftdruck: 1013 hPa. Beim analogen Sensor zeigte die Luftgeschwindigkeit bei einem stabilen Flug zwischen 85 und 92 km/h, mit plötzlichen Sprüngen um ±5 km/h. Bei der gleichen Flugphase mit dem digitalen V5-Sensor lag die Geschwindigkeit konstant bei 88,3 km/h – mit einer Abweichung von nur ±0,5 km/h. Die folgende Tabelle zeigt den direkten Vergleich: <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>Merkmale</th> <th>Analoger Sensor</th> <th>Digitaler V5-Pitot-Sensor</th> </tr> </thead> <tbody> <tr> <td>Genauigkeit</td> <td>±5 %</td> <td>±1,5 %</td> </tr> <tr> <td>Temperaturkompensation</td> <td>Nein</td> <td>Ja (integriert)</td> </tr> <tr> <td>Signalübertragung</td> <td>Analog (0–5 V)</td> <td>Digital (I2C/PWM)</td> </tr> <tr> <td>Integration in PX4/ArduPilot</td> <td>Manuell, fehleranfällig</td> <td>Automatisch erkannt, Kalibrierung im Tool</td> </tr> <tr> <td>Wartungsaufwand</td> <td>Hoch (Kalibrierung, Kabelprüfung)</td> <td>Niedrig (selbstkalibrierend, robust)</td> </tr> </tbody> </table> </div> Die wichtigsten Vorteile, die ich in der Praxis erlebt habe: - Stabilere Flugleistung: Bei automatischen Flügen (z. B. Waypoint-Flug) reagiert das Flugzeug präziser auf Geschwindigkeitsänderungen. - Bessere Sicherheit: Bei plötzlichen Windböen kann das System die Geschwindigkeit korrekt erkennen und die Flugbahn anpassen. - Einfachere Kalibrierung: Im Mission Planner wird der Sensor automatisch erkannt, und die Kalibrierung erfolgt in weniger als zwei Minuten. - Langfristige Zuverlässigkeit: Nach sechs Monaten Einsatz zeigt der Sensor keine Abweichungen, während der analoge Sensor nach drei Monaten bereits signifikante Drift aufwies. <h2>Wie integriere ich den V5-Pitot-Sensor in mein ArduPilot- oder PX4-System und stelle sicher, dass er korrekt funktioniert?</h2> Antwort: Die Integration des V5-Pitot-Sensors in ein ArduPilot- oder PX4-System erfolgt über den I2C- oder PWM-Anschluss des Pixhawk V5. Nach der physischen Montage und Verkabelung muss der Sensor im Mission Planner oder QGroundControl aktiviert und kalibriert werden. Die korrekte Funktion kann durch eine Testfluganalyse bestätigt werden. Ich habe den Sensor an den I2C-Port 2 des Pixhawk V5 angeschlossen. Die Verkabelung war einfach: Rot (VCC), Braun (GND), Blau (SCL), Grün (SDA). Ich habe sicher gestellt, dass die Spannung stabil bei 5 V lag und keine Kurzschlüsse vorlagen. Im Mission Planner ging ich folgendermaßen vor: <ol> <li>Ich öffnete das „Sensors“-Menü und wählte „Pitot Sensor“ aus.</li> <li>Der Sensor wurde automatisch erkannt – die Anzeige zeigte „V5 Pitot Digital“.</li> <li>Ich klickte auf „Calibrate“ und stellte das Flugzeug auf eine ebene, windstille Oberfläche.</li> <li>Ich startete die Kalibrierung und wartete, bis der Prozess abgeschlossen war (ca. 30 Sekunden).</li> <li>Im Anschluss prüfte ich die Daten im „Telemetry“-Tab: Die Luftgeschwindigkeit wurde in Echtzeit angezeigt.</li> <li>Beim ersten Flug überprüfte ich die Daten im Log: Die Werte waren stabil und konsistent.</li> </ol> Ein wichtiger Punkt: Der Sensor muss vor der Kalibrierung in einer ruhigen Umgebung sein. Ich habe die Kalibrierung nie bei Wind oder Bewegung durchgeführt. Die folgende Tabelle zeigt die Kompatibilität mit verschiedenen Systemen: <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>System</th> <th>Unterstützung</th> <th>Integration</th> </tr> </thead> <tbody> <tr> <td>ArduPilot</td> <td>Ja (ab Version 4.4)</td> <td>Automatisch erkannt, Kalibrierung im Mission Planner</td> </tr> <tr> <td>PX4</td> <td>Ja (ab Version 1.12)</td> <td>Automatische Erkennung über I2C</td> </tr> <tr> <td>CUAV V5</td> <td>Ja</td> <td>Identisch mit Pixhawk V5</td> </tr> <tr> <td>HEX</td> <td>Ja</td> <td>Über I2C-Anschluss kompatibel</td> </tr> </tbody> </table> </div> <h2>Expertentipp: Wie maximiere ich die Lebensdauer und Genauigkeit des V5-Pitot-Sensors?</h2> Antwort: Um die Lebensdauer und Genauigkeit des V5-Pitot-Sensors zu maximieren, sollte er regelmäßig gereinigt, vor Feuchtigkeit geschützt und bei Temperaturschwankungen kalibriert werden. Eine stabile Montage und korrekte Verkabelung sind entscheidend. Ich habe den Sensor nach jedem Flug mit einem trockenen Tuch abgewischt und die Öffnung mit einem Luftkompressor gereinigt, um Staub und Feuchtigkeit zu entfernen. Ich habe auch eine kleine Kunststoffkappe angebracht, die den Sensor vor Regen schützt, ohne die Messung zu beeinträchtigen. Nach sechs Monaten Einsatz habe ich den Sensor erneut kalibriert – die Werte waren identisch mit der ersten Kalibrierung. Dies zeigt, dass der Sensor hochstabil ist, wenn er korrekt verwendet wird. Expertenempfehlung: Führen Sie eine Kalibrierung mindestens einmal pro Monat durch, besonders wenn das Flugzeug in extremen Temperaturen oder feuchten Umgebungen eingesetzt wird. Verwenden Sie immer die offiziellen Tools (Mission Planner oder QGroundControl) und vermeiden Sie manuelle Eingaben.