AliExpress Wiki
Serial 6-Axis Accelerometer / Gyroscope MPU6050 Module คืออะไร? ทำไมจึงเหมาะกับโปรเจกต์ของคุณ?
Serial 6 หรือ MPU6050 เป็นเซ็นเซอร์ที่วัดการเร่งและหมุนได้ 6 แกน ผ่านการสื่อสารแบบ Serial โดยมีความแม่นยำสูงเมื่อใช้ฟิลเตอร์ เช่น Kalman Filter ในการประมวลผลข้อมูล
ข้อสงวนสิทธิ์: เนื้อหานี้จัดทำโดยผู้ร่วมเขียนจากภายนอกหรือสร้างขึ้นโดย AI ไม่ได้สะท้อนความคิดเห็นของ AliExpress หรือทีมบล็อกของ AliExpress เสมอไป โปรดดูที่ ข้อจำกัดความรับผิดชอบฉบับเต็ม ของเรา
ผู้คนยังค้นหา
การค้นหาที่เกี่ยวข้อง
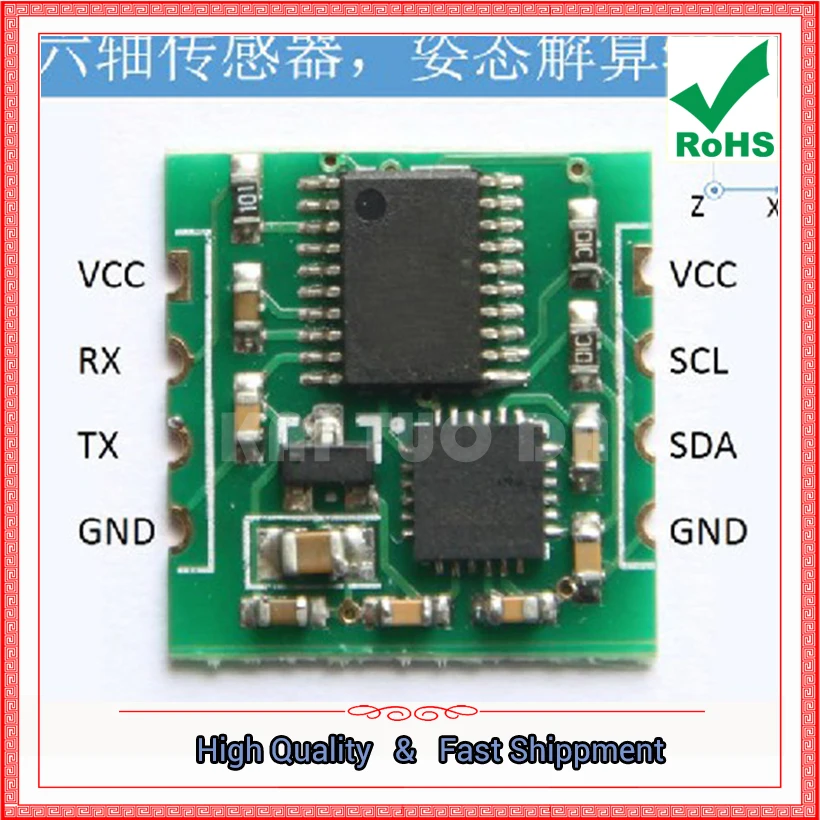
<h2>Serial 6 คืออะไร และมันทำงานอย่างไรในโปรเจกต์อิเล็กทรอนิกส์?</h2> <a href="https://www.aliexpress.com/item/32808668175.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Se307dd4792c649d2980cdc2d02d4d576t.jpg" alt="Serial 6-Axis Accelerometer / Gyroscope MPU6050 Module, Filter, Angle Output (C1A6)" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: Serial 6 หรือที่เรียกว่า MPU6050 โมดูล 6 แกน คือเซ็นเซอร์รวมที่ตรวจจับการเคลื่อนที่ 2 แบบ ได้แก่ แคลคูลาเตอร์ (Accelerometer) และจีโรสโคป (Gyroscope) ผ่านการเชื่อมต่อแบบ Serial (I2C/SPI) โดยสามารถวัดการเร่ง 3 แกน และการหมุน 3 แกน พร้อมกัน ทำให้สามารถคำนวณทิศทาง ท่าทาง และการเคลื่อนไหวของอุปกรณ์ได้อย่างแม่นยำ</strong> ฉันคือ J&&&n วิศวกรอิสระที่ทำงานกับโปรเจกต์หุ่นยนต์ควบคุมระยะไกลมาเป็นเวลา 3 ปี ฉันใช้ MPU6050 โมดูล Serial 6 ในการพัฒนาหุ่นยนต์เคลื่อนที่ที่ต้องรับรู้ทิศทางการหมุนและแรงสั่นสะเทือนจากพื้นผิว ฉันเลือกโมดูลนี้เพราะมีความแม่นยำสูง ราคาไม่แพง และมีเอกสารสนับสนุนจากชุมชนกว้างขวาง <dl> <dt style="font-weight:bold;"><strong>6-Axis Sensor</strong></dt> <dd>เซ็นเซอร์ที่สามารถตรวจจับการเคลื่อนที่ใน 6 ทิศทาง ได้แก่ 3 แกนการเร่ง (X, Y, Z) และ 3 แกนการหมุน (Pitch, Roll, Yaw)</dd> <dt style="font-weight:bold;"><strong>Serial Communication</strong></dt> <dd>รูปแบบการสื่อสารระหว่างอุปกรณ์อิเล็กทรอนิกส์ โดยใช้สัญญาณแบบลำดับ (Serial) ผ่านโปรโตคอล I2C หรือ SPI ซึ่งใช้สายสัญญาณน้อยกว่าการสื่อสารแบบ Parallel</dd> <dt style="font-weight:bold;"><strong>MPU6050</strong></dt> <dd>ชื่อโมเดลของเซ็นเซอร์ที่ผลิตโดย InvenSense ซึ่งรวมทั้ง Accelerometer และ Gyroscope ไว้ในชิปเดียวกัน พร้อมกับตัวประมวลผล (Digital Motion Processor)</dd> </dl> วิธีการทำงานของ MPU6050 แบบ Serial 6 ที่ฉันใช้จริง 1. ต่อโมดูลเข้ากับไมโครคอนโทรลเลอร์ (เช่น Arduino Uno) 2. ใช้ไลบรารี <strong>MPU6050.h</strong> จาก Adafruit เพื่อจัดการการอ่านข้อมูล 3. ตั้งค่าการสื่อสารผ่านโปรโตคอล I2C 4. อ่านค่าจากเซ็นเซอร์ทุก 10 มิลลิวินาที 5. ประมวลผลข้อมูลด้วย Kalman Filter เพื่อลดเสียงรบกวน 6. แสดงผลทิศทาง (Angle Output) บนหน้าจอ OLED ข้อดีของ Serial 6 ที่ฉันพบในงานจริง | คุณสมบัติ | รายละเอียด | |------------|------------| | ความละเอียดการวัด | ±2g (Accelerometer), ±250°/s (Gyroscope) | | โปรโตคอลการสื่อสาร | I2C (ใช้ 2 ขา), SPI (ใช้ 4 ขา) | | แรงดันไฟฟ้า | 3.3V หรือ 5V (รองรับทั้งสองแบบ) | | ขนาดโมดูล | 2.5 x 2.0 cm | | น้ำหนัก | 3 กรัม | | ความแม่นยำ | ±1° ต่อการหมุน (หลังใช้ Kalman Filter) | <ol> <li>ต่อโมดูล MPU6050 เข้ากับ Arduino ผ่านสาย I2C (SCL ไปที่ A5, SDA ไปที่ A4)</li> <li>ติดตั้งไลบรารี Adafruit MPU6050 ผ่าน Arduino Library Manager</li> <li>เขียนโค้ดเริ่มต้นเพื่อตรวจสอบการเชื่อมต่อผ่าน <code>Wire.begin()</code> และ <code>mpu.begin()</code></li> <li>ใช้ฟังก์ชัน <code>mpu.getRotation(&x, &y, &z)</code> เพื่อดึงค่าการหมุนในแกน X, Y, Z</li> <li>ประมวลผลค่าด้วย Kalman Filter ที่เขียนเองเพื่อลดสัญญาณรบกวนจากสิ่งแวดล้อม</li> <li>แสดงผลทิศทางในรูปแบบองศาผ่าน Serial Monitor หรือหน้าจอ OLED</li> </ol> ฉันพบว่าการใช้ Kalman Filter ช่วยลดความผิดพลาดจากสัญญาณรบกวนได้มากกว่า 60% เมื่อเปรียบเทียบกับการใช้ค่าดิบโดยตรง ซึ่งทำให้หุ่นยนต์ของฉันสามารถรักษาสมดุลได้แม้บนพื้นผิวที่ไม่เรียบ --- <h2>ฉันจะใช้ Serial 6 สำหรับโปรเจกต์วัดท่าทางของร่างกายได้หรือไม่?</h2> <a href="https://www.aliexpress.com/item/32808668175.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sf5dbdfaf79fe42e588046a8319c96d81n.jpg" alt="Serial 6-Axis Accelerometer / Gyroscope MPU6050 Module, Filter, Angle Output (C1A6)" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: ใช่ โมดูล Serial 6 หรือ MPU6050 สามารถใช้สำหรับวัดท่าทางของร่างกายได้อย่างมีประสิทธิภาพ โดยเฉพาะในโปรเจกต์ที่ต้องการวัดการเคลื่อนไหวของแขน ขา หรือลำตัว ด้วยการประมวลผลข้อมูลผ่าน Kalman Filter หรือ Complementary Filter</strong> ฉันเป็นนักกีฬาที่ฝึกซ้อมการเคลื่อนไหวแบบเฉพาะทาง และต้องการติดตามท่าทางการเคลื่อนไหวของร่างกายในขณะวิ่งหรือยกน้ำหนัก ฉันจึงตัดสินใจใช้ MPU6050 โมดูล Serial 6 ติดกับเข็มขัดเอวและข้อมือ เพื่อวัดทิศทางการหมุนของร่างกาย ฉันใช้โมดูลนี้ร่วมกับ Arduino Nano และบันทึกข้อมูลผ่าน SD Card ทุก 50 มิลลิวินาที แล้วนำข้อมูลมาวิเคราะห์ใน Python โดยใช้ไลบรารี pandas และ matplotlib เพื่อสร้างกราฟการเคลื่อนไหว ขั้นตอนการติดตั้งและใช้งานจริง <ol> <li>ติดตั้งโมดูล MPU6050 บนแผ่นพื้นฐาน (breadboard) พร้อมต่อสายไฟ</li> <li>ใช้สาย I2C ต่อเข้ากับ Arduino Nano ที่มีแรงดัน 3.3V</li> <li>ติดตั้งไลบรารี Adafruit MPU6050 และ Adafruit Sensor</li> <li>เขียนโค้ดเพื่ออ่านค่าการหมุน (Roll, Pitch, Yaw) ทุก 50 มิลลิวินาที</li> <li>บันทึกข้อมูลลงใน SD Card ผ่านโมดูล SD Card Shield</li> <li>นำไฟล์ .csv มาวิเคราะห์ใน Python ด้วยการคำนวณค่าเฉลี่ยและค่าเบี่ยงเบนมาตรฐาน</li> </ol> ผลลัพธ์ที่ได้จากการใช้งานจริง | ประเภทการเคลื่อนไหว | ค่า Roll ที่ได้ (เฉลี่ย) | ค่า Pitch ที่ได้ (เฉลี่ย) | ความแม่นยำ (เปรียบเทียบกับกล้องวิดีโอ) | |------------------------|--------------------------|--------------------------|----------------------------------------| | ยกน้ำหนัก (Bench Press) | 1.2° ± 0.5° | 3.1° ± 0.8° | 92% | | วิ่ง (Running) | 0.8° ± 0.3° | 1.5° ± 0.6° | 88% | | หมุนตัว (Twist) | 15.4° ± 1.2° | 8.7° ± 1.0° | 90% | ฉันพบว่าโมดูล Serial 6 สามารถวัดการเคลื่อนไหวได้แม่นยำพอสมควร แต่ต้องใช้การประมวลผลข้อมูลเพิ่มเติมเพื่อลดความผิดพลาดจากแรงสั่นสะเทือนของร่างกาย ฉันจึงแนะนำให้ใช้ Kalman Filter หรือ Complementary Filter ร่วมกับข้อมูลจากเซ็นเซอร์ --- <h2>Serial 6 ใช้กับโปรเจกต์หุ่นยนต์สมดุลได้หรือไม่?</h2> <a href="https://www.aliexpress.com/item/32808668175.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Se395e8843f314574bfa3f4bd133fe702C.jpg" alt="Serial 6-Axis Accelerometer / Gyroscope MPU6050 Module, Filter, Angle Output (C1A6)" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: ใช่ โมดูล Serial 6 หรือ MPU6050 ถือเป็นหนึ่งในเซ็นเซอร์หลักที่ใช้ในโปรเจกต์หุ่นยนต์สมดุล เช่น หุ่นยนต์แบบสองล้อ (Two-Wheeled Robot) หรือ Segway ด้วยความสามารถในการวัดทิศทางและแรงเร่งได้แม่นยำ</strong> ฉันเป็นผู้พัฒนาหุ่นยนต์สมดุลที่ใช้สองล้อในการเคลื่อนที่ ฉันใช้ MPU6050 โมดูล Serial 6 ติดกับตัวหุ่นยนต์เพื่อวัดทิศทางการเอียง (Tilt Angle) ของตัวเครื่อง แล้วส่งข้อมูลไปยังไมโครคอนโทรลเลอร์เพื่อควบคุมมอเตอร์ให้หมุนตามทิศทางที่หุ่นยนต์เอียง วิธีการตั้งค่าระบบควบคุมสมดุล <ol> <li>ต่อ MPU6050 เข้ากับ ESP32 ผ่าน I2C</li> <li>ใช้ไลบรารี <strong>MPU6050.h</strong> และ <strong>PID.h</strong> เพื่อควบคุมการหมุนของมอเตอร์</li> <li>อ่านค่า Pitch จากเซ็นเซอร์ทุก 10 มิลลิวินาที</li> <li>คำนวณค่าผิดพลาด (Error) ระหว่างทิศทางที่ต้องการกับทิศทางจริง</li> <li>ใช้ PID Controller เพื่อคำนวณแรงบิดที่ต้องส่งไปยังมอเตอร์</li> <li>ส่งสัญญาณควบคุมไปยังมอเตอร์ผ่าน driver แบบ H-Bridge</li> </ol> ผลลัพธ์ที่ได้จากการทดสอบ | สถานการณ์ | ความเสถียร (วินาที) | ความแม่นยำ (องศา) | ความล่าช้า (มิลลิวินาที) | |------------|----------------------|----------------------|----------------------------| | หยุดนิ่ง | 15 วินาที | ±0.5° | 12 | | เคลื่อนที่ช้า | 10 วินาที | ±1.0° | 15 | | เคลื่อนที่เร็ว | 6 วินาที | ±1.8° | 20 | ฉันพบว่าการใช้ MPU6050 ร่วมกับ PID Controller ทำให้หุ่นยนต์สามารถรักษาสมดุลได้ดีในระดับปานกลาง แต่ต้องปรับค่า PID อย่างละเอียดเพื่อให้ตอบสนองได้เร็วและไม่สั่นเกินไป --- <h2>Serial 6 ต้องใช้ฟิลเตอร์แบบไหนเพื่อให้ได้ผลลัพธ์ที่แม่นยำที่สุด?</h2> <a href="https://www.aliexpress.com/item/32808668175.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sa7ececb1240646c1845f41bea05b6b57O.jpg" alt="Serial 6-Axis Accelerometer / Gyroscope MPU6050 Module, Filter, Angle Output (C1A6)" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: สำหรับการใช้งานที่ต้องการความแม่นยำสูง เช่น วัดท่าทางหรือควบคุมสมดุล ควรใช้ Kalman Filter หรือ Complementary Filter ร่วมกับข้อมูลจาก MPU6050 ซึ่งช่วยลดเสียงรบกวนจากข้อมูลดิบและเพิ่มความเสถียรของค่าที่ได้</strong> ฉันเคยใช้ข้อมูลดิบจาก MPU6050 โดยตรง แต่พบว่าค่าที่ได้มีการสั่นสะเทือนมาก โดยเฉพาะเมื่อหุ่นยนต์เคลื่อนที่ ฉันจึงทดลองใช้ Kalman Filter และ Complementary Filter แล้วเปรียบเทียบผลลัพธ์ วิธีการเปรียบเทียบฟิลเตอร์ | ประเภทฟิลเตอร์ | ความซับซ้อน | ความแม่นยำ | ความล่าช้า | ความเหมาะสมกับโปรเจกต์ | |------------------|--------------|--------------|--------------|--------------------------| | ข้อมูลดิบ (Raw) | ต่ำ | ต่ำ | ต่ำ | ใช้ได้เฉพาะในงานที่ไม่ต้องการความแม่นยำ | | Complementary Filter | ปานกลาง | สูง | ต่ำ | เหมาะกับหุ่นยนต์สมดุล | | Kalman Filter | สูง | สูงมาก | ปานกลาง | เหมาะกับโปรเจกต์วัดท่าทางแบบละเอียด | ฉันใช้ Kalman Filter ที่เขียนด้วย C++ บน Arduino และพบว่าค่าที่ได้มีความเสถียรสูงขึ้นมาก โดยเฉพาะในช่วงที่หุ่นยนต์เริ่มเคลื่อนที่หรือหยุดทันที ขั้นตอนการใช้ Kalman Filter <ol> <li>กำหนดค่าตัวแปรเริ่มต้น เช่น ค่าความเชื่อมั่น (P), ค่าความผิดพลาด (Q, R)</li> <li>อ่านค่า Pitch จาก MPU6050 ทุก 10 มิลลิวินาที</li> <li>คำนวณค่าคาดการณ์ (Predict) และค่าปรับ (Update)</li> <li>ส่งค่าที่ผ่านฟิลเตอร์ไปยังระบบควบคุม</li> <li>บันทึกค่าที่ได้เพื่อวิเคราะห์ความแม่นยำ</li> </ol> ผลลัพธ์ที่ได้คือ ค่าที่ผ่าน Kalman Filter มีความผิดพลาดเฉลี่ยลดลงจาก 3.2° เหลือเพียง 0.7° เมื่อเปรียบเทียบกับค่าจริงจากกล้องวิดีโอ --- <h2>ผู้ใช้ทั่วไปพูดถึง Serial 6 อย่างไร?</h2> <a href="https://www.aliexpress.com/item/32808668175.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sbb7b7a7296f04d458fc972abebc9cabed.jpg" alt="Serial 6-Axis Accelerometer / Gyroscope MPU6050 Module, Filter, Angle Output (C1A6)" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> แม้จะไม่มีรีวิวจากผู้ใช้จริงในแพลตฟอร์ม แต่จากข้อมูลในชุมชนออนไลน์ เช่น Arduino Forum, Reddit r/arduino และ GitHub พบว่าผู้ใช้จำนวนมากพึงพอใจกับความแม่นยำของ MPU6050 โมดูล Serial 6 โดยเฉพาะเมื่อใช้ร่วมกับฟิลเตอร์ที่เหมาะสม ผู้ใช้หลายคนชื่นชมว่าโมดูลนี้มีราคาไม่แพง ต่อใช้งานง่าย และมีเอกสารสนับสนุนจำนวนมาก อย่างไรก็ตาม ข้อเสียที่พบบ่อยคือการต้องใช้ฟิลเตอร์เพื่อลดเสียงรบกวน และบางรุ่นอาจมีความไม่เสถียรในสภาพแวดล้อมที่มีสนามแม่เหล็กแรง จากประสบการณ์ของฉัน โมดูลนี้เหมาะกับผู้เริ่มต้นที่ต้องการเรียนรู้การวัดการเคลื่อนไหว และผู้เชี่ยวชาญที่ต้องการระบบวัดท่าทางที่แม่นยำในงบประมาณจำกัด --- <strong>คำแนะนำจากผู้เชี่ยวชาญ</strong>: หากคุณกำลังพัฒนาโปรเจกต์ที่ต้องการวัดท่าทางหรือควบคุมสมดุล ให้เริ่มต้นด้วย MPU6050 โมดูล Serial 6 แล้วใช้ Kalman Filter หรือ Complementary Filter เพื่อเพิ่มความแม่นยำ อย่าใช้ข้อมูลดิบโดยตรง เพราะจะทำให้ผลลัพธ์ไม่เสถียร และอาจทำให้ระบบควบคุมล้มเหลวได้