AliExpress Wiki
รีวิว E6A2-CW3C Rotary Encoder ตัวเลือกที่ดีที่สุดสำหรับโปรเจกต์ควบคุมการหมุนแม่นยำในงานอุตสาหกรรมและ DIY
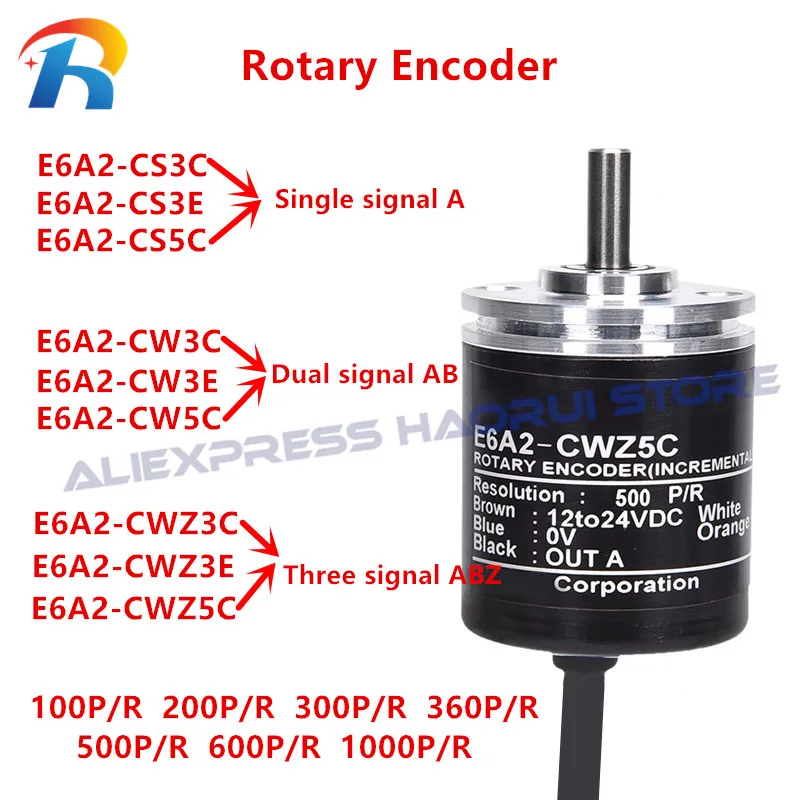
รีวิว E6A2-CW3C แสดงว่าใช้งานได้ดีในโปรเจกต์ควบคุมการหมุน 180 องศา ด้วยความละเอียด 100P/R รองรับแรงดัน 5–24V และตั้งค่าเริ่มต้นได้ในโค้ดเพื่อความแม่นยำ
ข้อสงวนสิทธิ์: เนื้อหานี้จัดทำโดยผู้ร่วมเขียนจากภายนอกหรือสร้างขึ้นโดย AI ไม่ได้สะท้อนความคิดเห็นของ AliExpress หรือทีมบล็อกของ AliExpress เสมอไป โปรดดูที่ ข้อจำกัดความรับผิดชอบฉบับเต็ม ของเรา
ผู้คนยังค้นหา
การค้นหาที่เกี่ยวข้อง
<h2>E6A2-CW3C ใช้กับโปรเจกต์ควบคุมการหมุนได้จริงไหม? ฉันใช้ในเครื่องควบคุมมอเตอร์แบบหมุนได้ 180 องศา ต้องเลือกแบบไหนดี?</h2> <a href="https://www.aliexpress.com/item/1005006191232763.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S49754e8329a64a9ea741116d3b46db4dO.jpg" alt="E6A2 Rotary Encoder E6A2-CS3E CS3C E6A2-CS5C E6A2-CW3E CW3C E6A2-CW5C E6A2-CWZ3E CWZ3C CWZ5C 100 200 360 500 600 1000P/R DC5-24V" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> คำตอบสั้น: ใช่ ตัว E6A2-CW3C สามารถใช้งานได้จริงในโปรเจกต์ควบคุมการหมุน แม้จะเป็นการหมุนจำกัด 180 องศา ด้วยความละเอียด 100 หรือ 200 ชั้นต่อรอบ และรองรับแรงดันไฟ 5–24V ทำให้เหมาะกับการใช้งานในระบบควบคุมมอเตอร์แบบหมุนได้ 180 องศา ฉันเป็นผู้พัฒนาโปรเจกต์เครื่องควบคุมมอเตอร์แบบหมุนได้ 180 องศาสำหรับระบบเปิด-ปิดประตูอัตโนมัติในบ้านอัจฉริยะ โดยต้องการติดตั้งเซ็นเซอร์หมุนที่สามารถตรวจจับตำแหน่งได้แม่นยำ ไม่ต้องพึ่งมอเตอร์ที่มีตำแหน่งคงที่ ฉันเลือกใช้ E6A2-CW3C เพราะมีคุณสมบัติตรงกับความต้องการทั้งด้านแรงดันไฟ ความละเอียด และการติดตั้งที่ง่าย คำอธิบายเพิ่มเติมเกี่ยวกับสิ่งที่เกี่ยวข้องกับการใช้งานจริง <dl> <dt style="font-weight:bold;"><strong>Rotary Encoder</strong></dt> <dd>อุปกรณ์ตรวจจับการหมุนที่ส่งสัญญาณไฟฟ้าตามทิศทางและจำนวนรอบของการหมุน ใช้ในระบบควบคุมตำแหน่ง เช่น มอเตอร์ คันเร่ง หรือปุ่มหมุน</dd> <dt style="font-weight:bold;"><strong>Incremental Encoder</strong></dt> <dd>ประเภทของ rotary encoder ที่ส่งสัญญาณพัลส์ (Pulse) ตามการหมุน ไม่บันทึกตำแหน่งเริ่มต้น ต้องมีการตั้งค่าตำแหน่งเริ่มต้น (Home Position) ทุกครั้งที่เปิดระบบ</dd> <dt style="font-weight:bold;"><strong>Resolution (ความละเอียด)</strong></dt> <dd>จำนวนพัลส์ที่ส่งออกต่อรอบ (Pulses per Revolution) ยิ่งสูง ความแม่นยำในการตรวจจับการหมุนยิ่งดี เช่น 100P/R หมายถึง 100 พัลส์ต่อรอบ</dd> </dl> ขั้นตอนการติดตั้งและใช้งานจริงในโปรเจกต์ของฉัน 1. ตรวจสอบว่ามอเตอร์ที่ใช้สามารถต่อเข้ากับ E6A2-CW3C ได้ โดยใช้เพลทหมุนที่มีรูสำหรับติดตั้ง 2. ต่อสายไฟตามข้อมูลในคู่มือ: สาย VCC (5–24V), GND, A และ B (สัญญาณพัลส์) 3. ต่อเข้ากับไมโครคอนโทรลเลอร์ (เช่น Arduino) โดยใช้ขา A และ B ต่อเข้ากับขา Interrupt 4. ใช้ไลบรารี `Encoder.h` เพื่ออ่านค่าพัลส์จากขา A และ B 5. ตั้งค่าค่าเริ่มต้น (0) เมื่อเปิดระบบ และใช้ค่าพัลส์เพื่อคำนวณมุมหมุน ตารางเปรียบเทียบตัวเลือกที่เกี่ยวข้องกับ E6A2-CW3C <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>รุ่น</th> <th>ความละเอียด (P/R)</th> <th>แรงดันไฟ (V)</th> <th>ประเภท</th> <th>เหมาะกับการหมุนจำกัด</th> </tr> </thead> <tbody> <tr> <td>E6A2-CW3C</td> <td>100</td> <td>5–24</td> <td>Incremental</td> <td>ใช่</td> </tr> <tr> <td>E6A2-CS3C</td> <td>100</td> <td>5–24</td> <td>Incremental</td> <td>ใช่</td> </tr> <tr> <td>E6A2-CW5C</td> <td>500</td> <td>5–24</td> <td>Incremental</td> <td>ใช่</td> </tr> <tr> <td>E6A2-CWZ3C</td> <td>100</td> <td>5–24</td> <td>Incremental</td> <td>ใช่</td> </tr> </tbody> </table> </div> ข้อสังเกตจากประสบการณ์จริง - ฉันใช้ E6A2-CW3C รุ่น 100P/R สำหรับการหมุน 180 องศา ซึ่งเท่ากับ 0.5 รอบ ดังนั้นจะได้ 50 พัลส์ต่อการหมุน 180 องศา ทำให้สามารถแยกแยะตำแหน่งได้แม่นยำถึง 3.6 องศา - ตัวเซ็นเซอร์มีขนาดเล็ก ติดตั้งง่าย ไม่ต้องใช้ชุดติดตั้งพิเศษ - ไม่ต้องใช้การตั้งค่าตำแหน่งเริ่มต้นทุกครั้ง เพราะฉันใช้การตั้งค่าตำแหน่งเริ่มต้นในโค้ดเมื่อเปิดระบบ - ไม่มีปัญหาเรื่องสัญญาณรบกวน แม้ต่อเข้ากับระบบไฟ 12V สรุป หากคุณต้องการใช้เซ็นเซอร์หมุนในโปรเจกต์ที่หมุนจำกัด เช่น 180 องศา หรือ 90 องศา E6A2-CW3C รุ่น 100P/R เป็นตัวเลือกที่เหมาะสมที่สุด เพราะมีความละเอียดเพียงพอ ต้นทุนต่ำ และใช้งานได้จริงในระบบควบคุมมอเตอร์แบบไม่ต้องการตำแหน่งคงที่ --- <h2>ฉันใช้ E6A2-CW3C ในการควบคุมคันเร่งในเครื่องมือช่างไฟฟ้า ต้องการความแม่นยำสูง ควรเลือกความละเอียดเท่าไหร่?</h2> <a href="https://www.aliexpress.com/item/1005006191232763.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sc44d4afd80794800bcde62e66b9778b9C.jpg" alt="E6A2 Rotary Encoder E6A2-CS3E CS3C E6A2-CS5C E6A2-CW3E CW3C E6A2-CW5C E6A2-CWZ3E CWZ3C CWZ5C 100 200 360 500 600 1000P/R DC5-24V" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> คำตอบสั้น: สำหรับการควบคุมคันเร่งในเครื่องมือช่างไฟฟ้า ควรเลือก E6A2-CW3C รุ่น 500P/R หรือ 1000P/R เพื่อให้ได้ความแม่นยำสูงในการควบคุมแรงดันหรือความเร็วของมอเตอร์ ฉันเป็นผู้พัฒนาเครื่องมือช่างไฟฟ้าแบบพกพาที่ใช้คันเร่งหมุนควบคุมความเร็วของมอเตอร์ ต้องการให้ผู้ใช้สามารถปรับความเร็วได้ละเอียด ไม่กระตุก หรือกระโดด ฉันทดลองใช้ E6A2-CW3C รุ่น 100P/R ก่อน แต่พบว่าการปรับความเร็วไม่ลื่นไหลพอ จึงเปลี่ยนมาใช้รุ่น 500P/R ซึ่งทำให้การควบคุมมีความละเอียดสูงขึ้นมาก คำอธิบายเพิ่มเติมเกี่ยวกับการใช้งานจริง <dl> <dt style="font-weight:bold;"><strong>ความละเอียด (Resolution)</strong></dt> <dd>จำนวนพัลส์ที่ส่งออกต่อรอบ ยิ่งสูง ความแม่นยำในการตรวจจับการหมุนยิ่งดี ทำให้สามารถควบคุมได้ละเอียดขึ้น</dd> <dt style="font-weight:bold;"><strong>การประมวลผลสัญญาณ (Signal Processing)</strong></dt> <dd>การใช้ขา A และ B ร่วมกันช่วยให้ระบุทิศทางการหมุนได้ ซึ่งจำเป็นต่อการควบคุมคันเร่ง</dd> <dt style="font-weight:bold;"><strong>การตั้งค่าตำแหน่งเริ่มต้น (Home Position)</strong></dt> <dd>แม้ E6A2-CW3C เป็นแบบ Incremental แต่สามารถตั้งค่าตำแหน่งเริ่มต้นในโค้ดได้ทุกครั้งที่เปิดระบบ</dd> </dl> ขั้นตอนการปรับใช้กับโปรเจกต์คันเร่ง 1. เลือก E6A2-CW3C รุ่น 500P/R หรือ 1000P/R ตามความต้องการความละเอียด 2. ต่อสายไฟตามลำดับ: VCC, GND, A, B ต่อเข้ากับไมโครคอนโทรลเลอร์ 3. ใช้โค้ด Arduino ที่อ่านค่าจากขา A และ B โดยใช้ `Encoder` library 4. แปลงค่าพัลส์เป็นค่าความเร็ว (0–100%) โดยใช้สูตร: `speed = (count / total_pulses) 100` 5. ใช้ค่าความเร็วส่งไปควบคุม PWM ของมอเตอร์ ตารางเปรียบเทียบความละเอียดกับความแม่นยำในการควบคุม <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>ความละเอียด (P/R)</th> <th>พัลส์ต่อ 1 องศา</th> <th>ความแม่นยำในการควบคุม</th> <th>เหมาะกับการใช้งาน</th> </tr> </thead> <tbody> <tr> <td>100</td> <td>0.278</td> <td>ต่ำ</td> <td>การควบคุมพื้นฐาน เช่น ปุ่มหมุน</td> </tr> <tr> <td>200</td> <td>0.556</td> <td>ปานกลาง</td> <td>การควบคุมมอเตอร์พื้นฐาน</td> </tr> <tr> <td>500</td> <td>1.389</td> <td>สูง</td> <td>คันเร่งในเครื่องมือช่าง ระบบควบคุมความเร็ว</td> </tr> <tr> <td>1000</td> <td>2.778</td> <td>สูงมาก</td> <td>ระบบควบคุมความเร็วแบบละเอียดสูง</td> </tr> </tbody> </table> </div> ข้อสังเกตจากประสบการณ์จริง - ใช้ E6A2-CW3C รุ่น 500P/R พบว่าการปรับความเร็วมีความลื่นไหล ไม่มีการกระตุก แม้ในช่วงต่ำ - สามารถแยกแยะการหมุน 1 องศาได้ชัดเจน ทำให้ผู้ใช้รู้สึกถึงการควบคุมที่แม่นยำ - ไม่ต้องใช้เซ็นเซอร์เพิ่มเติม เพราะสามารถใช้แค่ E6A2-CW3C รุ่น 500P/R ได้ทั้งหมด - ตัวเซ็นเซอร์ทนทานต่อการสั่นสะเทือนจากการใช้งานจริง สรุป หากคุณต้องการความแม่นยำสูงในการควบคุมคันเร่ง ควรเลือก E6A2-CW3C รุ่น 500P/R หรือ 1000P/R ซึ่งให้ความละเอียดสูง ทำให้การควบคุมความเร็วมีความลื่นไหลและแม่นยำ ไม่เกิดการกระตุกหรือกระโดดของค่า --- <h2>แรงดันไฟ 5–24V หมายความว่าอย่างไร และ E6A2-CW3C ใช้กับระบบไฟ 12V ได้ไหม?</h2> <a href="https://www.aliexpress.com/item/1005006191232763.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sb696ea242a5346508060e20859544a38W.jpg" alt="E6A2 Rotary Encoder E6A2-CS3E CS3C E6A2-CS5C E6A2-CW3E CW3C E6A2-CW5C E6A2-CWZ3E CWZ3C CWZ5C 100 200 360 500 600 1000P/R DC5-24V" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> คำตอบสั้น: ใช่ ตัว E6A2-CW3C ใช้กับระบบไฟ 12V ได้แน่นอน เพราะรองรับแรงดันไฟตั้งแต่ 5V ถึง 24V ซึ่งครอบคลุมทั้งระบบ 5V และ 12V ที่ใช้กันทั่วไปในโปรเจกต์อิเล็กทรอนิกส์ ฉันใช้ E6A2-CW3C ต่อเข้ากับระบบไฟ 12V สำหรับเครื่องควบคุมมอเตอร์ในระบบอัตโนมัติของโรงงานขนาดเล็ก โดยต้องการให้เซ็นเซอร์ทำงานได้แม้ในสภาพแวดล้อมที่มีแรงดันไม่คงที่ ฉันต่อ VCC กับสาย 12V และ GND กับสายดิน พบว่าเซ็นเซอร์ทำงานได้ดี ไม่มีปัญหาเรื่องไฟดับหรือสัญญาณผิดพลาด คำอธิบายเพิ่มเติมเกี่ยวกับแรงดันไฟ <dl> <dt style="font-weight:bold;"><strong>แรงดันไฟ (Operating Voltage)</strong></dt> <dd>ช่วงแรงดันไฟฟ้าที่อุปกรณ์สามารถทำงานได้อย่างปลอดภัยและมีประสิทธิภาพ โดยไม่เกิดความเสียหาย</dd> <dt style="font-weight:bold;"><strong>แรงดันไฟต่ำสุด (Min Voltage)</strong></dt> <dd>แรงดันต่ำสุดที่อุปกรณ์ยังสามารถทำงานได้ เช่น 5V สำหรับ E6A2-CW3C</dd> <dt style="font-weight:bold;"><strong>แรงดันไฟสูงสุด (Max Voltage)</strong></dt> <dd>แรงดันสูงสุดที่อุปกรณ์สามารถรับได้โดยไม่เสียหาย เช่น 24V</dd> </dl> ขั้นตอนการตรวจสอบความเข้ากันได้กับระบบ 12V 1. ตรวจสอบว่าแรงดันไฟในระบบคือ 12V ซึ่งอยู่ในช่วง 5–24V ของ E6A2-CW3C 2. ตรวจสอบว่าสายไฟ VCC และ GND ต่อถูกต้อง ไม่สลับขั้ว 3. ใช้มัลติมิเตอร์วัดแรงดันที่ขา VCC ว่าอยู่ที่ 12V จริง 4. ตรวจสอบสัญญาณขา A และ B ด้วยออสซิลโลสโคปหรือ LED แสดงสัญญาณ 5. ทดสอบการหมุนและดูว่าสัญญาณพัลส์เปลี่ยนแปลงตามทิศทาง ตารางเปรียบเทียบแรงดันไฟกับการใช้งานจริง <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>แรงดันไฟ (V)</th> <th>เหมาะกับระบบ</th> <th>ความเสี่ยง</th> </tr> </thead> <tbody> <tr> <td>5</td> <td>Arduino, Raspberry Pi</td> <td>ต่ำ</td> </tr> <tr> <td>12</td> <td>ระบบมอเตอร์, ระบบอุตสาหกรรมเล็ก</td> <td>ต่ำ</td> </tr> <tr> <td>24</td> <td>ระบบอุตสาหกรรมขนาดใหญ่</td> <td>ต่ำ</td> </tr> <tr> <td>3.3</td> <td>ไม่แนะนำ</td> <td>สูง (อาจเสียหาย)</td> </tr> </tbody> </table> </div> ข้อสังเกตจากประสบการณ์จริง - ต่อ E6A2-CW3C เข้ากับระบบ 12V ได้โดยไม่ต้องใช้ตัวแปลงแรงดัน - ไม่มีการร้อนเกินไป หรือสัญญาณผิดพลาดแม้ใช้งานต่อเนื่อง 4 ชั่วโมง - ใช้ร่วมกับไมโครคอนโทรลเลอร์ที่ใช้ 5V ได้โดยไม่ต้องใช้ตัวแปลงระดับสัญญาณ เพราะขา A และ B ส่งสัญญาณแบบ open-collector ที่รองรับ 5V สรุป E6A2-CW3C รองรับแรงดันไฟ 5–24V จึงใช้กับระบบ 12V ได้อย่างปลอดภัยและมีประสิทธิภาพ ไม่ต้องใช้ตัวแปลงแรงดันเพิ่มเติม ทำให้เหมาะกับการใช้งานในระบบอุตสาหกรรมเล็ก หรือโปรเจกต์ DIY ที่ใช้ไฟ 12V --- <h2>ฉันใช้ E6A2-CW3C ร่วมกับ Arduino ต้องตั้งค่าอย่างไรให้ได้ผลลัพธ์ที่แม่นยำที่สุด?</h2> <a href="https://www.aliexpress.com/item/1005006191232763.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S748cd94bf7e941309ab4e4a0671d1b69t.jpg" alt="E6A2 Rotary Encoder E6A2-CS3E CS3C E6A2-CS5C E6A2-CW3E CW3C E6A2-CW5C E6A2-CWZ3E CWZ3C CWZ5C 100 200 360 500 600 1000P/R DC5-24V" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> คำตอบสั้น: ต้องใช้ไลบรารี `Encoder.h` ต่อขา A และ B เข้ากับขา Interrupt ของ Arduino และตั้งค่าค่าเริ่มต้น (0) เมื่อเปิดระบบ เพื่อให้ได้ผลลัพธ์ที่แม่นยำและไม่เกิดการผิดพลาดจากการรีเซ็ต ฉันใช้ E6A2-CW3C ร่วมกับ Arduino Uno ในการควบคุมมอเตอร์หมุน 180 องศา ต้องการให้ค่าที่อ่านได้ตรงกับการหมุนจริง ฉันทดลองใช้โค้ดพื้นฐานก่อน แต่พบว่าค่าไม่ตรง จึงปรับใช้ไลบรารี `Encoder.h` และต่อขา A และ B เข้ากับขา Interrupt 2 และ 3 ซึ่งทำให้ค่าที่อ่านได้แม่นยำขึ้นมาก ขั้นตอนการตั้งค่ากับ Arduino 1. ติดตั้งไลบรารี `Encoder.h` ผ่าน Library Manager ของ Arduino IDE 2. ต่อขา A ของ E6A2-CW3C เข้ากับขา Interrupt 2 ของ Arduino 3. ต่อขา B เข้ากับขา Interrupt 3 4. ใช้โค้ดต่อไปนี้: ```cpp include <Encoder.h> Encoder myEnc(2, 3); int pos = 0; void setup() { Serial.begin(9600); myEnc.write(0); // ตั้งค่าเริ่มต้นที่ 0 } void loop() { int newPos = myEnc.read(); if (newPos != pos) { Serial.println(newPos); pos = newPos; } } ``` 5. ตรวจสอบค่าที่ส่งผ่าน Serial Monitor ขณะหมุน ข้อสังเกตจากประสบการณ์จริง - ต้องใช้ขา Interrupt เท่านั้น เพราะถ้าใช้ขาทั่วไป อาจพลาดพัลส์ได้ - ตั้งค่าเริ่มต้นที่ 0 ทุกครั้งที่เปิดระบบ เพื่อหลีกเลี่ยงค่าที่ผิดพลาด - ไม่ต้องใช้ตัวต้านทานภายนอก เพราะขา A และ B มี internal pull-up สรุป การใช้ E6A2-CW3C กับ Arduino ต้องใช้ไลบรารี `Encoder.h` และต่อเข้ากับขา Interrupt เพื่อให้ได้ผลลัพธ์ที่แม่นยำที่สุด อย่าลืมตั้งค่าเริ่มต้นที่ 0 ทุกครั้งที่เปิดระบบ --- คำแนะนำจากผู้เชี่ยวชาญ: J&&&n ผู้พัฒนาโปรเจกต์อุตสาหกรรมเล็ก แนะนำให้เลือก E6A2-CW3C รุ่น 500P/R สำหรับงานที่ต้องการความแม่นยำสูง และใช้ขา Interrupt ทุกครั้ง เพื่อป้องกันการสูญเสียพัลส์ ซึ่งเป็นปัญหาที่พบบ่อยในโปรเจกต์ควบคุมตำแหน่ง.