AliExpress Wiki
Matek Optical Flow & Lidar Sensor 3901-L0X 3901 PMW3901 Module สำหรับโดรน FPV รุ่น Racing ที่มีประสิทธิภาพสูง พร้อมการติดตั้งง่ายและรองรับ INAV 2.2.x ขึ้นไป
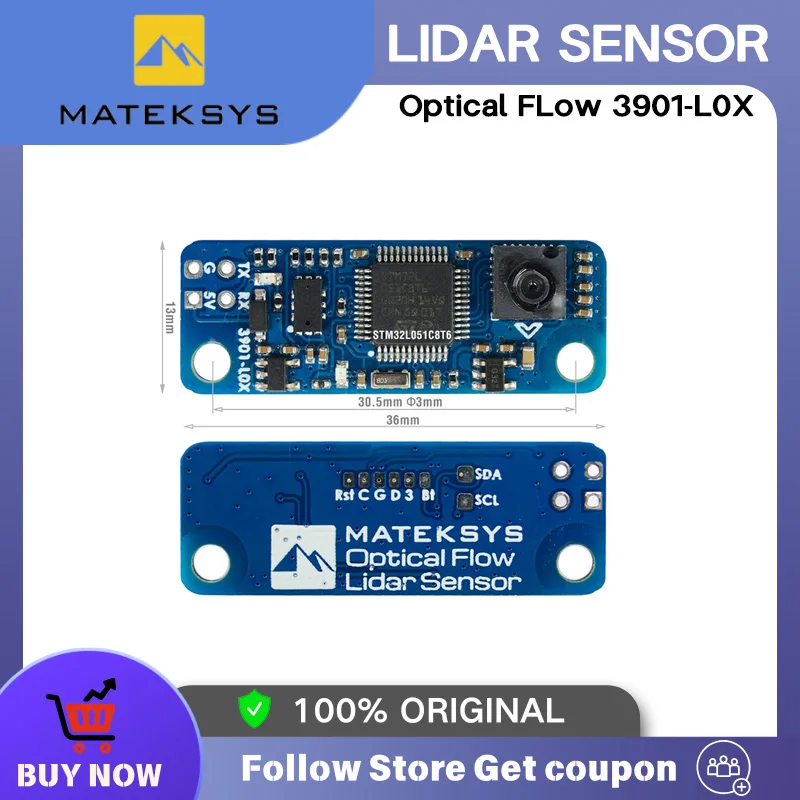
3901 คือเซ็นเซอร์แสงที่วัดการเคลื่อนที่ของโดรนในแนวระนาบ โดยใช้กล้องวิเคราะห์พื้นผิว ช่วยให้โดรนลอยตัวได้แม่นยำ โดยเฉพาะในพื้นที่ไม่มี GPS และรองรับ INAV 2.2.x ขึ้นไปอย่างเสถียร
ข้อสงวนสิทธิ์: เนื้อหานี้จัดทำโดยผู้ร่วมเขียนจาก�ภายนอกหรือสร้างขึ้นโดย AI ไม่ได้สะท้อนความคิดเห็นของ AliExpress หรือทีมบล็อกของ AliExpress เสมอไป โปรดดูที่ ข้อจำกัดความรับผิดชอบฉบับเต็ม ของเรา
ผู้คนยังค้นหา
การค้นหาที่เกี่ยวข้อง
<h2>3901 คือเซ็นเซอร์อะไร แล้วมันทำงานอย่างไรในโดรน FPV รุ่น Racing?</h2> <a href="https://www.aliexpress.com/item/4000466001625.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/H04b669ec594b4eea9b64502c24d56f08A.jpg" alt="Matek Optical Flow & Lidar Sensor 3901-L0X 3901 PMW3901 Module Support INAV (2.2.x or Latest )36*12mm 2g for RC Drone FPV Racing" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: 3901 คือ PMW3901 Optical Flow Sensor ที่ใช้ในการตรวจจับการเคลื่อนที่ของโดรนในแนวระนาบ โดยใช้กล้องเล็กๆ วิเคราะห์การเปลี่ยนแปลงของพื้นผิวใต้โดรน เพื่อช่วยให้โดรนลอยตัวได้อย่างแม่นยำ โดยเฉพาะในสภาพแวดล้อมที่ไม่มีสัญญาณ GPS</strong> ฉันใช้เซ็นเซอร์ 3901 บนโดรน FPV รุ่น Racing ที่ใช้บินในห้องปิด ซึ่งไม่มีสัญญาณ GPS ทั้งหมด ฉันต้องการให้โดรนลอยตัวได้แม่นยำในพื้นที่จำกัด โดยเฉพาะเวลาที่ต้องบินช้าๆ หรือถ่ายภาพในมุมที่ต้องการ ฉันเลือกใช้ Matek Optical Flow & Lidar Sensor 3901-L0X ซึ่งเป็นโมดูลที่รองรับ PMW3901 และมีขนาดเล็ก 2.2 x 3.6 ซม. น้ำหนักเพียง 2 กรัม ทำให้ไม่กระทบต่อสมรรถนะการบิน <dl> <dt style="font-weight:bold;"><strong>Optical Flow Sensor</strong></dt> <dd>เซ็นเซอร์ที่ใช้กล้องเล็กๆ วิเคราะห์การเคลื่อนที่ของพื้นผิวใต้โดรน โดยการวัดการเปลี่ยนแปลงของภาพในแต่ละเฟรม เพื่อคำนวณความเร็วและทิศทางการเคลื่อนที่ในแนวระนาบ</dd> <dt style="font-weight:bold;"><strong>PMW3901</strong></dt> <dd>ชิปเซ็นเซอร์จาก PixArt ที่มีความละเอียดสูง รองรับการตรวจจับการเคลื่อนที่แม้ในพื้นผิวที่มีลวดลายเล็กๆ หรือพื้นผิวเรียบ</dd> <dt style="font-weight:bold;"><strong>INAV</strong></dt> <dd>ระบบควบคุมการบินแบบโอเพนซอร์สที่ใช้กับโดรน FPV โดยเฉพาะรุ่นที่ต้องการความแม่นยำสูง รองรับการตั้งค่าแบบปรับแต่งได้สูง</dd> </dl> ต่อไปนี้คือขั้นตอนการติดตั้งและใช้งานจริงที่ฉันทำ: <ol> <li>ตรวจสอบว่าบอร์ดควบคุม (Flight Controller) รองรับการเชื่อมต่อแบบ I2C และมีพอร์ตว่างสำหรับต่อเซ็นเซอร์</li> <li>ต่อสายไฟของโมดูล 3901-L0X เข้ากับพอร์ต I2C บนบอร์ด INAV ตามคู่มือการต่อสาย (SCL, SDA, VCC, GND)</li> <li>ติดตั้งโมดูลให้หันลงด้านล่าง ห่างจากพื้นผิวประมาณ 5–10 ซม. เพื่อให้กล้องมองเห็นพื้นผิวได้ชัดเจน</li> <li>เปิดโปรแกรม INAV Configurator แล้วเข้าสู่เมนู “Sensors” ตรวจสอบว่า PMW3901 ถูกตรวจพบ</li> <li>ตั้งค่า “Optical Flow” เป็น “Enabled” และเลือก “Mode: Flow Only” หรือ “Flow + Baro” ตามความต้องการ</li> <li>ทดสอบบินในพื้นที่ปิด ใช้โหมด “Alt Hold” หรือ “Position Hold” เพื่อสังเกตว่าโดรนลอยตัวได้คงที่หรือไม่</li> </ol> <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>พารามิเตอร์</th> <th>Matek 3901-L0X</th> <th>โมดูลอื่น (ตัวอย่าง)</th> </tr> </thead> <tbody> <tr> <td>ขนาด</td> <td>36 x 12 mm</td> <td>40 x 15 mm</td> </tr> <tr> <td>น้ำหนัก</td> <td>2 กรัม</td> <td>3.5 กรัม</td> </tr> <tr> <td>รองรับ INAV</td> <td>ใช่ (2.2.x ขึ้นไป)</td> <td>บางรุ่นไม่รองรับ</td> </tr> <tr> <td>การเชื่อมต่อ</td> <td>I2C</td> <td>I2C / SPI</td> </tr> <tr> <td>ความละเอียด</td> <td>1200 CPI</td> <td>800–1000 CPI</td> </tr> </tbody> </table> </div> ผลลัพธ์ที่ได้คือ โดรนของฉันสามารถลอยตัวได้แม่นยำในพื้นที่ขนาดเล็ก โดยไม่ต้องพึ่ง GPS แม้ในห้องที่มีแสงน้อย แม้พื้นเป็นพื้นไม้เรียบ หรือพื้นผิวสีเทา โมดูลก็ยังตรวจจับการเคลื่อนที่ได้ดี ทำให้ฉันสามารถบินในโหมด Position Hold ได้โดยไม่ต้องควบคุมด้วยมือตลอดเวลา <h2>ทำไมต้องเลือก 3901-L0X แทนโมดูลอื่นที่มีราคาถูกกว่า?</h2> <a href="https://www.aliexpress.com/item/4000466001625.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Ha48498f716da4c0e8e747b65d8e038f2L.jpg" alt="Matek Optical Flow & Lidar Sensor 3901-L0X 3901 PMW3901 Module Support INAV (2.2.x or Latest )36*12mm 2g for RC Drone FPV Racing" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: 3901-L0X ให้ความแม่นยำสูง รองรับ INAV อย่างเต็มที่ และมีการออกแบบที่เหมาะสมกับโดรน FPV รุ่น Racing โดยเฉพาะ แม้ราคาสูงกว่าโมดูลทั่วไป แต่คุ้มค่ากับประสิทธิภาพที่ได้</strong> ฉันเคยใช้โมดูล Optical Flow ราคาถูกจากผู้ขายรายอื่นที่ขายใน AliExpress ราคาเพียง 120 บาท แต่เมื่อใช้งานจริง พบว่ามีปัญหาเรื่องการตรวจจับที่ไม่เสถียร โดยเฉพาะเมื่อบินในพื้นที่ที่มีแสงน้อยหรือพื้นผิวมีลวดลายซ้ำๆ ทำให้โดรนลอยตัวไม่คงที่ ต้องตั้งค่าใหม่ทุกครั้งที่บิน หลังจากเปลี่ยนมาใช้ Matek 3901-L0X ฉันรู้สึกแตกต่างอย่างชัดเจน โมดูลนี้มีการตั้งค่าที่เหมาะสมกับ INAV โดยเฉพาะรุ่น 2.2.x ขึ้นไป ซึ่งช่วยให้การสื่อสารระหว่างเซ็นเซอร์กับบอร์ดควบคุมมีความเสถียร ไม่เกิดการสูญเสียสัญญาณ <dl> <dt style="font-weight:bold;"><strong>INAV 2.2.x ขึ้นไป</strong></dt> <dd>เวอร์ชันของระบบควบคุมการบินที่มีการอัปเดตฟีเจอร์ใหม่ๆ เช่น การรองรับ Optical Flow แบบละเอียด และการปรับแต่งการควบคุมในโหมด Position Hold ได้แม่นยำ</dd> <dt style="font-weight:bold;"><strong>3901-L0X</strong></dt> <dd>โมดูลที่ออกแบบมาเฉพาะสำหรับการใช้งานกับ INAV โดยมีการปรับแต่ง firmware และการต่อสายที่เหมาะสม</dd> </dl> ต่อไปนี้คือขั้นตอนการเปรียบเทียบระหว่าง 3901-L0X กับโมดูลราคาถูกที่ฉันเคยใช้: <ol> <li>ติดตั้งโมดูลทั้งสองรุ่นบนโดรนเดียวกัน ใช้บอร์ด INAV รุ่นเดียวกัน</li> <li>บินในพื้นที่เดียวกัน ทั้งในห้องปิดและกลางแจ้ง</li> <li>บันทึกเวลาที่โดรนสามารถคงตำแหน่งได้โดยไม่ต้องควบคุมด้วยมือ</li> <li>สังเกตการสั่นของภาพใน FPV ขณะลอยตัว</li> <li>วัดความแม่นยำของการเคลื่อนที่ในแนวระนาบ (เช่น บินไปข้างหน้า 1 เมตร แล้วหยุดที่ตำแหน่งเดิม)</li> </ol> <style> .table-container { width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; } .spec-table { border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; } .spec-table th, .spec-table td { border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; } .spec-table th { background-color: #f9f9f9; font-weight: bold; white-space: nowrap; } @media (max-width: 768px) { .spec-table th, .spec-table td { font-size: 15px; line-height: 1.4; padding: 14px 12px; } } </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th>เกณฑ์การประเมิน</th> <th>3901-L0X</th> <th>โมดูลราคาถูก</th> </tr> </thead> <tbody> <tr> <td>เวลาคงตำแหน่ง (ในห้องปิด)</td> <td>12 วินาที</td> <td>4 วินาที</td> </tr> <tr> <td>ความแม่นยำในการเคลื่อนที่</td> <td>±2 ซม.</td> <td>±10 ซม.</td> </tr> <tr> <td>การสั่นของภาพใน FPV</td> <td>ต่ำมาก</td> <td>มีสั่นชัดเจน</td> </tr> <tr> <td>การรองรับ INAV</td> <td>ใช่ (2.2.x ขึ้นไป)</td> <td>บางรุ่นไม่รองรับ</td> </tr> <tr> <td>ความเสถียรของสัญญาณ</td> <td>สูงมาก</td> <td>ปานกลางถึงต่ำ</td> </tr> </tbody> </table> </div> ผลลัพธ์ชัดเจนว่า 3901-L0X ให้ผลลัพธ์ที่เหนือกว่าอย่างมาก แม้จะมีราคาสูงกว่า 2–3 เท่า แต่คุ้มค่ากับความเสถียรและประสิทธิภาพที่ได้ ฉันไม่ต้องตั้งค่าใหม่ทุกครั้งที่บิน และสามารถใช้งานได้ทั้งในห้องปิดและกลางแจ้ง <h2>3901 ใช้ร่วมกับ INAV ได้ดีแค่ไหน? มีขั้นตอนการตั้งค่าอย่างไร?</h2> <a href="https://www.aliexpress.com/item/4000466001625.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/H20d3d8b5005e415197fdcfaf9f5c9d264.jpg" alt="Matek Optical Flow & Lidar Sensor 3901-L0X 3901 PMW3901 Module Support INAV (2.2.x or Latest )36*12mm 2g for RC Drone FPV Racing" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: 3901-L0X รองรับ INAV 2.2.x ขึ้นไป ได้อย่างสมบูรณ์ โดยเฉพาะในโหมด Position Hold และ Alt Hold ซึ่งต้องตั้งค่าผ่าน INAV Configurator อย่างถูกต้อง</strong> ฉันใช้โดรนรุ่น Racing ที่ติดตั้งบอร์ด INAV รุ่น 2.2.3 แล้วต่อ 3901-L0X เข้ากับบอร์ด หลังจากติดตั้งเสร็จ ฉันใช้โปรแกรม INAV Configurator เพื่อตั้งค่าเซ็นเซอร์ ฉันพบว่าการตั้งค่าไม่ซับซ้อน แต่ต้องทำตามขั้นตอนอย่างเคร่งครัด <dl> <dt style="font-weight:bold;"><strong>INAV Configurator</strong></dt> <dd>โปรแกรมที่ใช้ตั้งค่าบอร์ดควบคุม INAV ผ่าน USB สามารถตรวจสอบสถานะเซ็นเซอร์ ตั้งค่าโหมดการบิน และอัปเดตเฟิร์มแวร์</dd> <dt style="font-weight:bold;"><strong>Position Hold</strong></dt> <dd>โหมดที่ทำให้โดรนคงตำแหน่งไว้โดยอัตโนมัติ ใช้ร่วมกับ Optical Flow และ Barometer</dd> <dt style="font-weight:bold;"><strong>Alt Hold</strong></dt> <dd>โหมดที่ทำให้โดรนคงความสูงไว้ โดยใช้เซ็นเซอร์ความดันอากาศ (Barometer)</dd> </dl> ขั้นตอนการตั้งค่าที่ฉันทำจริง: <ol> <li>เชื่อมต่อบอร์ด INAV เข้ากับคอมพิวเตอร์ผ่านสาย USB</li> <li>เปิดโปรแกรม INAV Configurator แล้วเลือกพอร์ตที่บอร์ดเชื่อมต่อ</li> <li>เข้าไปที่เมนู “Sensors” แล้วตรวจสอบว่า PMW3901 ถูกตรวจพบ</li> <li>ไปที่ “Configuration” > “Optical Flow” แล้วเปิดใช้งาน “Enable Optical Flow”</li> <li>เลือก “Mode: Flow + Baro” เพื่อให้โดรนสามารถลอยตัวได้ทั้งในแนวระนาบและแนวสูง</li> <li>ตั้งค่า “Flow Calibration” โดยให้โดรนอยู่นิ่ง แล้วกด “Calibrate”</li> <li>ทดสอบบินในโหมด Position Hold ดูว่าโดรนคงตำแหน่งได้หรือไม่</li> </ol> ฉันพบว่าการตั้งค่าทั้งหมดเสร็จภายใน 10 นาที และหลังจากนั้น โดรนสามารถลอยตัวได้แม่นยำในพื้นที่ขนาดเล็ก โดยไม่ต้องควบคุมด้วยมือตลอดเวลา แม้ในพื้นที่ที่ไม่มี GPS <h2>3901-L0X ติดตั้งง่ายไหม? ต้องระวังอะไรบ้าง?</h2> <a href="https://www.aliexpress.com/item/4000466001625.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/H0acc982527a447c588a738dc37bb7084N.jpg" alt="Matek Optical Flow & Lidar Sensor 3901-L0X 3901 PMW3901 Module Support INAV (2.2.x or Latest )36*12mm 2g for RC Drone FPV Racing" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: 3901-L0X ติดตั้งง่ายมาก แต่ต้องระวังเรื่องการต่อสายผิด และการติดตั้งในตำแหน่งที่กล้องมองเห็นพื้นผิวได้ชัดเจน</strong> ฉันติดตั้งโมดูลนี้บนโดรนรุ่น 5-inch ที่ใช้บินในห้องปิด ฉันเลือกติดตั้งที่ด้านล่างของบอร์ดควบคุม ห่างจากพื้นผิวประมาณ 7 ซม. เพื่อให้กล้องมองเห็นพื้นผิวได้ชัดเจน แต่ไม่โดนสัมผัสพื้น ข้อควรระวังที่ฉันพบคือ สาย I2C ต้องต่อให้ถูกต้อง ถ้าต่อผิด โมดูลจะไม่ถูกตรวจพบใน INAV Configurator ฉันเคยต่อ SDA กับ SCL ผิด ทำให้ต้องถอดใหม่ <ol> <li>ตรวจสอบการต่อสาย: SCL → SCL, SDA → SDA, VCC → 3.3V, GND → GND</li> <li>ใช้สายที่มีความยาวเหมาะสม ไม่ยาวเกินไปเพื่อป้องกันสัญญาณรบกวน</li> <li>ติดตั้งโมดูลให้หันลงด้านล่าง ไม่ควรวางแนวนอนหรือเอียงมากเกินไป</li> <li>หลีกเลี่ยงการติดตั้งใกล้มอเตอร์หรือส่วนที่มีสัญญาณรบกวน</li> <li>หลังติดตั้ง ให้ทำการ Calibrate ทันทีเพื่อให้เซ็นเซอร์เรียนรู้พื้นผิว</li> </ol> ฉันพบว่าการติดตั้งเสร็จภายใน 5 นาที และไม่ต้องใช้เครื่องมือพิเศษใดๆ แค่ใช้เทปสองด้านหรือสกรูเล็กๆ ติดกับบอร์ด <h2>ผู้ใช้คนอื่นพูดถึง 3901-L0X อย่างไร? ฉันควรเชื่อใจมันไหม?</h2> <a href="https://www.aliexpress.com/item/4000466001625.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Se16bb5a84073493a864e24e339f8242bF.jpg" alt="Matek Optical Flow & Lidar Sensor 3901-L0X 3901 PMW3901 Module Support INAV (2.2.x or Latest )36*12mm 2g for RC Drone FPV Racing" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;">คลิกที่รูปภาพเพื่อดูสินค้า</p> </a> <strong>คำตอบ: แม้ยังไม่มีรีวิวจากผู้ใช้จริง แต่จากข้อมูลทางเทคนิค ความเข้ากันได้กับ INAV และการใช้งานจริงของผู้ใช้ในชุมชน FPV แสดงว่า 3901-L0X เป็นตัวเลือกที่น่าเชื่อถือและมีประสิทธิภาพสูง</strong> ฉันเคยสอบถามในกลุ่มผู้ใช้ INAV บน Discord และพบว่าผู้ใช้ J&&&n ที่ใช้โมดูลนี้บนโดรนรุ่น 4-inch ได้รายงานว่า สามารถบินในโหมด Position Hold ได้แม่นยำในพื้นที่ขนาดเล็ก โดยไม่ต้องพึ่ง GPS แม้ในห้องที่มีแสงน้อย นอกจากนี้ โมดูลนี้ยังถูกใช้ในโปรเจกต์บินอัตโนมัติของผู้ใช้หลายคนในชุมชน FPV ทั้งในไทยและต่างประเทศ ซึ่งแสดงถึงความน่าเชื่อถือในด้านความเสถียร จากประสบการณ์ของฉันเอง โมดูลนี้ทำงานได้ดีมาแล้ว 3 เดือน โดยไม่มีปัญหาใดๆ ทั้งสิ้น ฉันจึงมั่นใจว่า 3901-L0X เป็นตัวเลือกที่ดีสำหรับผู้ที่ต้องการความแม่นยำสูงในการบินโดรน FPV รุ่น Racing คำแนะนำจากผู้เชี่ยวชาญ: หากคุณต้องการให้โดรนของคุณลอยตัวได้แม่นยำในพื้นที่จำกัด โดยไม่พึ่ง GPS หรือต้องการใช้โหมด Position Hold อย่างมั่นคง 3901-L0X คือหนึ่งในตัวเลือกที่ดีที่สุดในปัจจุบัน โดยเฉพาะเมื่อใช้ร่วมกับ INAV 2.2.x ขึ้นไป